1. 引言
控制舰艇的结构振动能够有效降低其在水中的辐射噪声,对于提高舰艇的隐声性具有至关重要的作用 [1] 。目前舰艇的减振降噪主要从声源和声传播途径两方面考虑,控制手段包括设备与结构优化、被动隔振吸振、使用阻尼材料、采用新型材料、以及主动控制等 [2] 。主动控制概念最早由德国的Paul Leug提出 [3] ,检测出目标振动初级信号后,通过分析和运算使次级激励源产生次级信号去抵消初级信号来达到减振目的。在结构振动主动控制系统中,主动控制算法是控制效果的核心。由Widrow和Hoff首次提出的LMS (Least Mean Square)算法 [4] 以及由Morgan和Burgess提出的FxLMS (Filtered-X Least Mean Square)算法 [5] 是广泛应用的自适应主动控制算法。根据两类经典算法又引申出一系列相关的算法。薄中 [6] 设计提出的VFVS-FXWALMS算法可以根据步长以及遗忘因子参数对系统性能的影响进行优化;苏雨 [7] 通过使用Volterra滤波器,分析了FxLMS算法的次级通道传递函数非线性的影响;蒋尧 [8] 提出的NWSFXLMS算法可以增强系统收敛性能和降噪性能、SFELMS算法可以提升系统稳定性、降噪性能和计算效率,并将这两种算法结合,增强了对宽窄带混合噪声的降噪能力。
在以上提到的FxLMS主动控制算法中,次级通道的传递函数是一个关键参数,它是指主动控制系统中参考信号与误差传感器输出之间的传递函数。主动控制系统需要对外部噪声进行抑制,并利用参考信号和误差传感器输出之间的差异来产生控制信号,其值提供了有关系统动态响应的重要信息,可帮助优化控制策略并提高系统性能。次级通道的传递函数辨识分为两大类:离线辨识和在线辨识。离线辨识方法是在安装控制器之前,测定次级通道的传递函数
,在主动控制器进行振动控制的过程中,直接将
作为参数输入。而次级通道的传递函数可能随着时间和环境的变化而发生变化,因此需要定期进行测量和调整,以确保主动噪声控制系统的性能和稳定性。针对这个问题,Eriksson和Allie于1989年提出一种在线辨识策略 [9] ,通过在控制器输出端叠加噪声,作为辨识滤波器的输入信号,辨识滤波器权值直至收敛到所需的S。目前大多数在线辨识的次级滤波器的算法都是基于LMS算法,如李超博 [10] 直接使用Eriksson和Allie的方法;浦玉学 [11] 等人对附加噪声信号进行调整;袁军 [12] 等人采用变步长VSS (Variable Step Size) LMS算法来进行辨识,并且采取修改的LMSN (LMS Newton)算法来更新主动控制滤波器、辨识滤波器以外的第3个滤波器的权值,用来消除误差信号与参考输入信号相关的信号;吕韦喜 [13] 使用动量LMS算法等。而通过Eugene Walach和Bernard Widrow的研究 [14] 可以看出,LMF算法在信号中存在无关噪声的情况下收敛效果比LMS好。
在自适应滤波算法中,通常采用LMS算法或NLMS算法来估计次级通道传递函数,本文引入LMF算法作为辨识滤波器算法,为次级通道在线辨识提供新的方法。利用虚拟仪器软件LabVIEW,设计了LMS算法和LMF算法的通道辨识仿真模型,并通过仿真结果比较了这两种算法在次级通道传递函数辨识方面的效果。
2. LMS及LMF算法原理
自适应LMS算法是线性自适应滤波算法设计中的参照标准,因其简单易用而广受欢迎。自适应算法根据误差信号调整滤波器的系数,使其能够更好地适应输入信号。通过辨识滤波器预测参考信号,辨识
滤波器采用长度为N的FIR横向滤波器,表示形式为
,其中
为由参考传感
器接收到的输入信号,可将上式表示为向量形式:
(1)
自适应算法收敛的关键点在于权向量的
调整,权向量
可用下式表示:
(2)
式中
为滤波器权值,其中
。
输入信号
也可用向量表示:
(3)
则误差信号
可表示为:
(4)
其中
是输入信号
经过初级通道后的信号。
LMS算法以最小均方误差为判据,用单次采样数据获得的平方误差
表示均方误差J,其表达式为:
(5)
其中E为期望运算。
通过最速下降法对权向量进行迭代:
(6)
其中
为步长因子。
式(6)中的梯度运算为:
(7)
此时权向量w更新为:
(8)
式(8)的收敛条件为:
(9)
其中,
是输入向量
的方差矩阵的最大特征值,由于此算法处理的噪声信号均值几乎都为0或者接近0,可以认为
即
的均方值。当权值更新公式(8)右侧的第二项
为0时,方程收敛达到稳态。
根据文献 [14] ,Eugene Walach和Bernard Widrow的算法可以将瞬时误差
提升到2K次方(
)则此时对应于式(7),
对于权向量
的微分所得到的瞬时梯度公式变为:
(10)
此时,权向量的更新公式也由式(8)变为了:
(11)
式(11)的收敛条件为:
(12)
其中
是结构中的动态噪声(Process Noise),也就是由误差传感器接收到的
中所包含的无关于本滤波器结构的噪声信号,如图1所示位置。

Figure 1. Basic algorithm block diagram
图1. 算法基本框图
当K = 1时,可以认为是此算法的特殊形式,也就是LMS算法,此时
为1,即公式(9),故LMS算法的收敛条件中只有
一项。
当K = 2时,算法中瞬时梯度为:
(13)
此时变为LMF (Least Mean Fourth)算法。相应地,权向量的更新公式变为:
(14)
从权值更新公式可以看出,LMF算法每次迭代比LMS算法多两次乘法,运算量增加不大。
式(14)的收敛条件为:
(15)
根据文献 [14] ,算法的时间松弛常数
(Relaxation Time Constants)可以由下式确定:
(16)
(17)
其中
是输入向量的方差矩阵的特征值。从式(17)看出,LMS算法和LMF算法的时间松弛常数是成比例的,且与动态噪声
有关。文献中证明当动态噪声以白噪声、正弦波等形式存在时,将两种算法
调整到令时间松弛常数相等,LMF算法结果的失调误差小于LMS算法,也就是说目标失调误差值一定的情况下,LMF算法收敛到目标值需要更少的时间。
3. 误差通道传递函数的LMF在线辨识
目前,由Eriksson和Allie提出的误差通道在线辨识方法是应用最广泛的在线辨识方法之一。由于次级作动力需要经过传递路径才能到达误差传感器,便会产生次级通道的传递函数
,如图2所示,次级通道的传递路径由虚线表示。在使用在线辨识方法的滤波X (Fx/Filtered-X)相关算法中 [5] ,可以采用LMS算法对
进行辨识,得到一个传递函数的估计
。该方法的基本原理是在次级通道上加入一个输入信号
作为辨识滤波器的参考信号,经由自适应算法使得辨识滤波器的权系数逐渐收敛到所需的
。在具体结构上,辨识系统通过主动控制系统的次级作动器额外叠加一个RNG (Random Noise Generator)产生噪声信号输入结构中,并通过主动控制系统的误差传感器接收经过次级通道的信号
和
叠加后形成的误差信号
进行在线辨识,如图2所示,在线辨识过程不需要在控制器上增加任何物理元件,只需要在控制器运行过程中增加计算机的计算量就可以实现。
FxLMS算法是在LMS算法的基础上,考虑次级通道的影响,次级通道通过
描述次级通道的传递函数矩阵,在参考信号
参与权值调整计算之前先对其进行滤波处理。这样,FxLMS算法可以通过在线辨识次级通道的传递函数,自适应地调整控制器的参数,从而更有效地抑制振动。相比于传统的LMS算法,FxLMS算法具有更好的控制性能和鲁棒性。
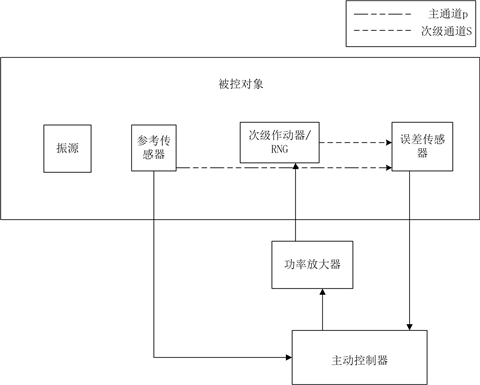
Figure 2. Schematic diagram of active control system
图2. 主动控制结构示意图
次级通道在线辨识的FxLMS主动控制框图如图3所示,其中
是
经初级通道后的信号,
为输入信号经过次级通道传递函数估计
滤波后的信号。
和
这两个信号通过次级通路后与
叠加得到误差信号
。再通过推导得到权系数w的更新公式。
输入信号变为:
(18)
(19)
其中H为次级通道传递函数S的辨识滤波器长度。输出信号
为:
(20)
其中L为主动控制滤波器长度。计算误差信号
:
(21)
根据FxLMS算法,权系数的更新公式变为:
(22)
传统的在线辨识算法应用自适应LMS算法。关键步骤中的误差通道滤波器辨识环节为:
(23)
其中
为传递函数估计的矩阵,
为辨识滤波器步长,
为误差信号
与辨识滤波器滤波信号
叠加后的信号,
表达式为:
(24)
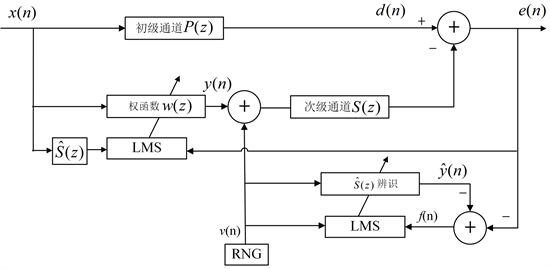
Figure 3. Active control block diagram based on LMS identification filter
图3. 基于LMS辨识滤波器的主动控制框图
在线辨识方法中,辨识滤波器迭代所使用的误差信号
既包含经过次级通道的辨识滤波器输入信号
,也包含主动控制参考信号
以及控制信号
通过次级通道传递后的信号,后面这两部分信号被认为是影响辨识滤波器信号处理的动态噪声
:
(25)
在用作主动控制滤波器时,动态噪声
由系统外部影响产生,信号强度往往不大,一般不会被考虑到控制器设计中,也不会参与算法,但是当自适应算法用作辨识滤波器时,动态噪声信号
的强度会高于
。根据上一节内容,当结构中的动态噪声存在时,LMF算法的效果要优于传统的LMS算法,因此引入LMF算法作为辨识滤波器的算法,以寻求更好的辨识效果。引入新算法后的整体框图如图4所示,更新了辨识滤波器的算法部分,此时误差通道传递函数的辨识收敛公式将变为:
(26)

Figure 4. Active control block diagram based on LMF identification filter
图4. 基于LMF辨识滤波器的主动控制框图
4. 基于LabVIEW软件仿真分析
LabVIEW作为一款虚拟仪器软件,可以通过编程实现各种硬件设备的功能以及各种环境下的输入信号。本节利用虚拟仪器软件LabVIEW,设计了次级通道传递函数的LMS辨识器以及LMF辨识器的仿真系统,构建了RNG、次级通道、自适应滤波器及误差信号
的通道部分。借助仿真结果,对比说明两种辨识器在次级通道辨识上的效果。
仿真结果由次级通道的传递函数
与辨识系统所得
之间的均方误差(Mean-Square Error, MSE)作为指标:
(27)
自适应算法的收敛速度与步长有关,步长越大收敛速度越快,但是过大的步长会导致结果稳态失调量变大甚至失稳 [15] 。在仿真中,通过多次仿真实验,算法的步长被设置为各自具有最佳收敛速度且不会失稳,并且辨识结果的均方误差能保持在0.005以下的最大步长,以确保两种算法都在最佳的工作状态下进行对比。此外,滤波器长度均为64。
工况1:在主通道关闭的情况下,即误差信号
中只包含通过次级通道的随机噪声
。此工况等同于离线辨识,设置
为标准差为1的白噪声信号。
设置LMS算法步长为0.01,LMF算法步长为0.006。辨识结果如图5所示,可以看出LMS算法和LMF算法在离线辨识工况下使用情况均良好,LMF算法收敛速度比LMS算法快。辨识得到的
与真实次级通道传递函数S间的均方误差降至0.005以下,LMF算法仅需50次迭代,用时0.18秒;而LMS算法则需要近100次迭代,用时0.26秒,LMF算法在离线辨识中的收敛速度比LMS算法快。150次迭代后,两种算法都趋于稳定。
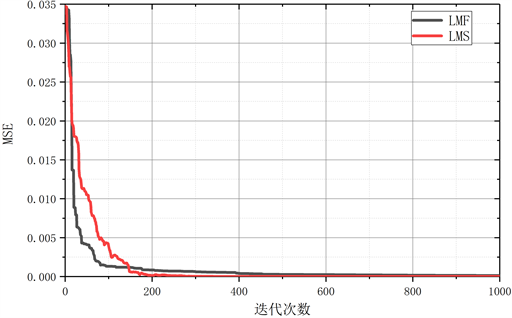
Figure 5. Offline identification performance comparison of LMS and LMF algorithms (SNR = −∞ dB)
图5. LMS算法与LMF算法离线辨识效果(SNR = −∞ dB)
工况2:在主动控制系统的主通道接入一个频率为90 Hz,幅值为15的单频正弦信号,模拟系统的主通路开启,被控对象处于振动状态,也就是
中包括经过次级通路的
和
信号,
为标准差为1的白噪声信号。此时主动控制系统与RNG的信噪比为20 dB。信噪比(SNR)的计算方法如下:
(28)
其中
指的是主动控制系统的有效功率,也就是
信号的平均功率;
指的是RNG所产生的
信号的平均功率。
设置LMS算法步长为8 × 10−5,LMF算法步长为8 × 10−7。辨识结果如图6所示,LMF算法收敛速度明显快于LMS算法。6000次迭代时,LMF算法已经辨识出接近稳定的次级通道传递函数,用时16.16 s;而LMS算法则需要接近10,000次迭代才能达到类似的效果,用时26.64 s。这表明,当主动控制系统刚开始运作时,误差信号中仍包含较大振动信号时,LMF算法就能够发挥较好的作用,相较于LMS算法更快地为主动控制算法提供准确的传递函数
。

Figure 6. Online identification performance comparison of LMS and LMF algorithms (SNR = 20 dB)
图6. LMS算法与LMF算法在线辨识效果(SNR = 20 dB)
工况3:在上述工况下,向
中额外加入标准差为1的白噪声信号,以此模拟被控对象产生的振动噪声和传递过程中的噪声信号,不对两种算法的步长进行修改,LMS算法步长为8 × 10−5,LMF算法步长为8 × 10−7。辨识结果如图7所示,LMF依然保持稳定,并且在8000次迭代后将MSE降至0.0025左右,用时20.79 s;LMS算法因为受到干扰,在步长不变的情况下结果不收敛。本算例结果说明基于LMF算法的辨识系统在无关噪声的干扰下依然有较强的辨识能力和鲁棒性,工作能力不会受误差信号中的噪声信号的影响。
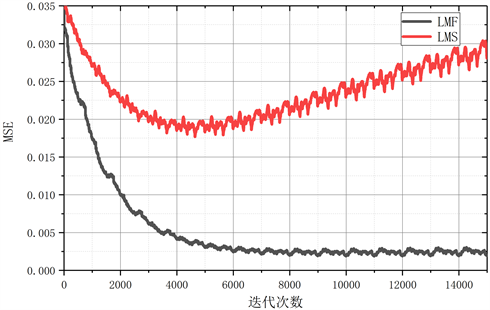
Figure 7. Online identification performance comparison of LMS and LMF algorithms (SNR = 17 dB)
图7. LMS算法与LMF算法在线辨识效果(SNR = 17 dB)
工况4:将主通道信号幅值降至原来的十分之一,RNG产生的噪声信号与上一工况相同,为标准差为1的白噪声信号。此工况模拟主动控制器产生作用,进入次级通道的
信号减少,此时的信噪比不到1 dB。
设置LMS算法步长为0.005,LMF算法步长为0.001。辨识结果如图8所示,两种算法收敛速度相似,都在近200次迭代后趋于稳定,LMS算法用时0.55 s,LMF算法0.60 s,但是最终LMF算法结果稳定性强于LMS算法,LMS算法迭代趋于稳定之后仍有一定波动,稳定后LMS算法的MSE方差要大于LMF算法。本算例说明LMF算法在主动控制系统持续运作时,处于低信噪比状态下,辨识结果的稳定性强于LMS算法,实际使用中信号中包含的无关噪声信号更有可能对使用LMS算法的在线辨识器造成不良影响。
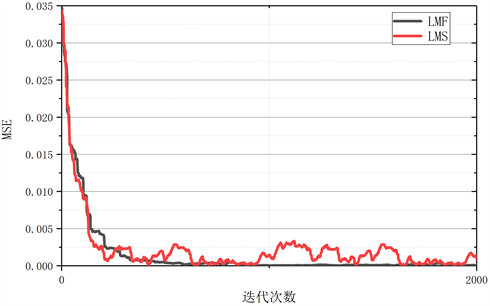
Figure 8. Online identification performance comparison of LMS and LMF algorithms (SNR < 1 dB)
图8. LMS算法与LMF算法在线辨识效果(SNR < 1 dB)
以上结果对比,如表1所示。在本文四种工况的仿真情况下,在信噪比为负无穷时,也就是离线辨识状态下,通过LMF算法进行次级通道传递函数辨识,稳定后传递函数MSE方差及传递函数误差都大于LMS算法,LMS算法更适合用于离线辨识;但是在信噪比大于0 dB的情况下,也就是在线辨识状况下,LMF算法无论是稳定所需的迭代次数、结果稳定所需时间还是传递函数MSE的方差及传递函数误差,都要小于LMS算法;在误差信号中存在无关噪声信号的时候,LMF算法的鲁棒性要强于LMS算法。本节通过仿真实验证明,将LMF算法应用于主动控制中次级通道传递函数的在线辨识时,相比LMS算法,能够更快向主动控制算法提供更为准确的误差通道传递函数的估计
,是一种具有更大发展潜力的在线辨识滤波器算法。

Table 1. Comparison of identification performance of LMS and LMF algorithms under four working conditions
表1. 四种工况下LMS算法与LMF算法辨识效果对比
5. 结论
1) 本文对比分析了用于次级通道在线辨识的LMS和LMF算法,阐述了LMF算法的优点,LMF算法在过程噪声存在的情况下相较于LMS算法收敛速度更快,收敛结果更准确。
2) 引入LMF算法,改进了FxLMS算法的在线辨识部分,揭示了辨识滤波器使用LMF算法提升辨识效果的机理。
3) 通过使用LabVIEW软件进行仿真实验,测试了不同信噪比下四种工况的LMS和LMF算法的辨识效果。结果表明,LMF算法在应用于次级通道传递函数的在线辨识时,较LMS算法具有收敛速度更快、鲁棒性更强、辨识结果更准确的优点。
基金项目
国家自然科学基金重点项目(51839005)。
NOTES
*通讯作者。