1. 汽轮机猫爪支撑基本结构
目前在役的汽轮机高、中压汽缸一般由前后两端,沿纵向中心线左右对称的四个猫爪支撑在前后轴承座或者专用的基础平台上,通过猫爪底部垫片调整汽缸标高,负荷分配,水平及扬度,保持汽缸与汽轮机转子径向,轴向相对位置 [1]。如某核电厂ALSTOM半速机前端两猫爪分别支撑在1号轴承箱,后端两猫爪分别支撑在2号轴承箱;某核电厂SIEMENS半速机前后端4个猫爪则支撑在4个专用的基础台板上。C1-C4四个猫爪支撑方式如图1所示。
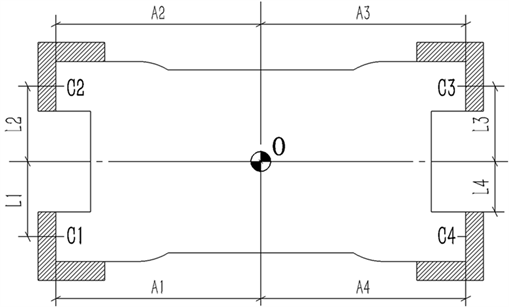
Figure 1. Schematic diagram of cylinder cat claw support
图1. 汽缸猫爪支撑示意图
2. 猫爪负荷分配偏差危害分析
2.1. 猫爪负荷偏差来源
正常而言,汽轮机高中压缸在所有附属蒸汽管道未连接的全实缸状态,猫爪负荷已经过调整实现了均匀分配,此时猫爪所承受的载荷主要来自于汽缸自重,因汽缸部件一般左右均匀对称设计,所以负荷分配调整相对较为简单。
当汽缸所属进排汽、回热管道安装完成,因管道焊接工艺不当,支吊架设计、安装偏差等因素导致管道在冷热态下将有一部力作用到汽缸底部,并因传导到汽缸底部力的不均匀且偏离重心,对汽缸形成翻转力矩,该力矩则需要通过猫爪处的负荷重新分配来平衡。
支撑汽轮机猫爪载荷的轴承座,基础在运行中受静态力,来自于机械设备振动的动态力,温度变化所产生的内应力共同作用,会出现不均匀沉降而导致汽缸猫爪负荷重新分配,尤其汽轮发电机组运行的首个周期尤为明显。
2.2. 猫爪负荷偏差主要危害分析
汽轮机汽缸设计为一端为固定死点限制移动,一端沿轴向可自由膨胀、收缩,以适应冷热态几百摄氏度的温差变化。猫爪负荷分配偏差大,最直接的危害就是汽缸膨胀、收缩时受阻,尽管猫爪底部垫片对光洁度的要求很高,以尽可能减小摩擦力,部分猫爪底部垫片采用表面渗氮或嵌入石墨的方式减小摩擦系数。
当C1-C4猫爪负荷不均匀时,其摩擦力Fi = μiQi大小不同,式中μ——摩擦系数(垫片摩擦系数可取0.08~0.10),Q——汽轮机自重与管道附加力的合力,i = 1,2,3,4。
假设猫爪C1和C2负荷分配存在明显差异,其差值为ΔF,则汽缸因温度变化产生膨胀收缩时会产生偏转力矩
,其值与负荷差值及两猫爪间距(L1 + L2)成正比,当M值足够大时,汽缸将发生局部变形,导致与转子局部动静间隙消失而发生碰磨,不但会引起大的轴系振动,并对汽缸和转子结构产生伤害,在摩擦受损位置产生应力集中点,而降低疲劳寿命;
偏转力矩还会使汽缸底部贴死立销一侧,增加缸体和立销间的摩擦力,导致汽缸上下膨胀受阻。尤其当立销间隙偏大时,当偏转力矩增加到足以克服猫爪摩擦力的一定值后,汽缸将产生突然的滑移,瞬间接触高速旋转的转子,两者间产生巨大的冲击效应,可造成严重事故及不可估量的损失;
汽缸猫爪支撑在基础或轴承座弹性系统上,发生偏转后弹性系统刚度k改变,其自身固有频率
随之改变,当
落入管道、流体等外部激振力频带范围内,则产生结构共振,而加速汽缸金属
部件疲劳;
2.1节中管道作用在汽缸底部的翻转力矩,促使汽缸与转子同心度发生改变,转子叶轮顶部在圆周形成不均匀间隙。汽流流经叶轮顶部密封腔室,发生不均匀的焓降,圆周不均匀分布的汽流动能及紊流作用,易诱发汽轮机转子汽流激振故障;
汽缸受到的偏转力矩和翻转力矩传导至轴承座,轴承座水平和轴向扬度会发生一定的变化,则会影响到轴承和轴承座的接触以及轴承的标高值,接触劣化使轴承在运行中易产生高频共振,轴承垫铁承受高能量交变循环应力而至表层过早疲劳剥落,轴承标高值变化则直接影响轴承的稳定性。
3. 汽缸猫爪负荷分配传统试验方法的不足
目前国内汽轮发电机组安装或检修期间,汽缸猫爪负荷分配常用猫爪垂弧法,差压法和测力计法,其中猫爪垂弧法分别在C1-C4垂直方向架设百分表监测猫爪位移,百分表装在固定于基础的专用支架上。分别抽取猫爪底部垫片后读取百分表变量ΔAi,以变量大者即负荷大做定性分析。垫片调整量按照
或
计算,由负荷大的一侧抽出厚度
的垫片加到另一侧对称位置猫爪下,具体调整哪一端视现场具体情况而定,一般而言优选选择调整量小,距离重心较近的一端。调整完毕后重复以上步骤,采取逐步逼近的方式,最终达到横向两侧对称猫爪垂弧差值 ≤ 0.10 mm即为合格;
差压法在各猫爪底部架设千斤顶,分别逐步抬升猫爪,记录油压和顶升高度的关系,根据相互间的关系评判后调整猫爪底部垫片,同样需要采用多次调整,逐步逼近的方法;
测力计法则采用分别在各猫爪位置安装测力计,测力计在原猫爪标高的基础上分别调整到猫爪负荷分配的设计值,然后测量此时测力计底部垫片厚度H1,与原始垫片厚度H0相比较,其差值ΔH即为该处垫片的调整量。
差压法和测力计法均以猫爪的吨位作为负荷分配合格的量值,其中测力计吨位由测力计碟簧变形量(测力计上百分表读数)——弹性力的对应关系表查的。以吨位做为猫爪负荷分配的标准为对称位置的负荷差
值
为合格。
以上三种猫爪负荷分配方法分别存在不足之处,尤其前两种试验方法精度极低,数据的获取过程非常粗略,常需要反复多次测量调整,逐步逼近标准值,对人力和物力都造成很大的浪费,尤其猫爪负荷分配往往处于安装,检修工序逻辑中的关键路径上,易对工程的工期造成冲击。
三种猫爪负荷分配试验方法中测力计法相对精度高,但是测力计本身易产生误差,需经常校验。测力计内部碟簧受仓储、保养、使用频次的影响误差不断加大,所以现场采用测力计试验法同样需要多次调整才能最终满足标准要求,并且测力计测量猫爪负荷分配对汽缸本身结构有特定的要求。
4. 猫爪负荷分配交叉影响代入调整计算
4.1. 猫爪支撑结构对负荷分配的影响分析
如图1,汽轮机汽缸由前后4个猫爪支撑,属于静定结构。当猫爪C1-C4负荷相等时有
式1
对于完全对称设计的汽缸,由式1可知F1 = F2,F3 = F4,进而可推导出F1 = F3,F2 = F4,式1说明增减一个猫爪的负荷,其对角猫爪负荷则跟随同步增减。
所以已在安装中获得猫爪负荷合理分配的汽缸,检修时最常见的一种猫爪负荷分配状态为,当C1 > C2则有C3 > C4,C1 < C2则有C3 < C4。也验证了猫爪对角负荷同升同降的理论成立。
对于轴向不对称汽缸,由式1可知对角猫爪负荷仍旧遵循同步增减规律,但量值按照猫爪位置重心距的反比增减。如猫爪C1处增减负荷ΔF1,则对角猫爪C3增减负荷为
,同理
以上分析给猫爪负荷分配试验带来较大的便利,理论上只要调整汽缸一端猫爪负荷分配合格,则另一端的猫爪负荷分配自然合格。
4.2. 猫爪负荷分配交叉影响分析计算
传统猫爪负荷分配调整均以单个猫爪作为计算的基本单元,实际汽缸具有一定的弯曲刚度EI。在顶升某一个猫爪至一定高度后,此时测量出的猫爪负荷不仅仅来自于该猫爪自身,对称位置的另一猫爪一部分负荷发生转移,将猫爪底部支撑视为线性弹性系统,其刚度K由轴承座刚度K1,基础刚度K2串联
而成。则支撑总刚度
,设顶升猫爪C1试验时,猫爪C2有位移量r,则猫爪C2转移到C1的负荷计算为
。
传统的调整计算方法显然忽略了这种交叉影响,导致计算精度极低,不得已只能多次调整,逐步逼近标准值的方式。
如要保证试验中调整计算的精准性,则需要将这种猫爪间的交叉影响代入计算。
根据第2节中猫爪静定结构的分析,在此以前端C1,C2猫爪负荷分配调整计算为例,阐述汽轮机大修中猫爪负荷分配的试验步骤和代入交叉影响的计算方法。
1) 猫爪负荷分配试验前,在汽缸洼窝位置架设百分表监测洼窝位置汽缸位移,试验过程应始终保持该处位移量小于轴封间隙最小值,避免接触;
2) 分别用百分表监测C1,C2猫爪顶升高度,百分表应安装在固定于基础的专用支架上;
3) 在猫爪C1下架设千斤顶,在猫爪原始标高位置将百分表调零,千斤缓慢顶升猫爪,其增量应保证猫爪有明显顶起高度;
4) 分别记录此时猫爪C1和C2的顶升高度变化值A1,A2;
5) 同样的方法用千斤顶顶升猫爪C2,分别记录猫爪C2和C1的顶起高度变化值B2,B1;
计算试验过程猫爪间分别对应的反应值
,
,
,
式2
若保证对称两侧猫爪负荷相同,应满足
式3
进一步计算得
式4
把汽缸猫爪视为线性弹性体,其受力F = Kr,即负荷与猫爪标高位移成正比
则垫片调整量ΔH1计算为
式5
若式5中当
,
,
显然等于零,则不需要调整。其中
表示反应值,双下标第一个数字表示监测位置,第二个数字表示试验位置;T表示千斤顶力的增量;Q1,Q2分别表示C1,C2猫爪下实际负荷;H1表示C1猫爪下原始垫片厚度。
以某核电厂某大修期间试验数据为例,采用差压法对比代入交叉影响的猫爪负荷分配调整计算法,分析对最终试验结果的影响。
① 采用传统的差压法计算猫爪垫片调整量
表1中数据计算两猫爪负荷差值为:
计算猫爪C1顶升力增量4.17T/0.10 mm;猫爪C2顶升力增量2.83T/0.10 mm,则猫爪底部垫片调整量为0.016~0.025 mm
② 将交叉影响代入计算的猫爪负荷分配调整量
试验中采用表1中数据,参数分别T = 12.5T力,H1 = 0.5 mm,A1 = 0.30 mm,A2 = 0.05 mm,B2 = 0.80 mm,B1 = 0.02 mm,计算ΔH1 = 0.25 mm。
以上计算结果可见差压法在负荷偏差达38%的情况下,调整量仅不到0.03 mm,计算结果显然不正确,只能用作定性分析。现场实践最终调整垫片厚度为0.20 mm,与代入交叉影响的计算值接近,猫爪负荷分配调整后最终偏差值1%。

Table 1. Cat claw load distribution, test process data
表1. 猫爪负荷分配,试验过程数据
4.3. 大修中猫爪负荷分配试验前的关键点确认
大修中在负荷分配试验前应首先分析偏差来源,并制定针对性的方案,是合理实施猫爪负荷分配的前提,且不可盲目实施,尤其发现偏差过大时。正常而言因汽轮机在安装时已在多个状态实施过猫爪负荷分配,所以大修时一般不会出现过大偏差,如前文所述大修时猫爪负荷分配变化主要来自于① 导汽管道支吊架,在X,Y,Z空间方向对管道约束偏离设计值;② 汽缸附属管道应力释放;③ 基础不均匀沉降。
大修中猫爪负荷分配试验若发现偏差过大,应首先检查导汽管道支吊架状态,无论是支吊架本身发生偏差还是因管道热应力释放引起支吊架状态偏离设计值,发现异常后都应重新调整至设计值,然后再次实施猫爪负荷分配。支吊架设计在冷态下有一部分管道力由汽缸承担,并因其在汽轮机大修前已采取闭锁措施,所以猫爪负荷分配试验应在支吊架闭锁释放前完成 [2] [3]。
汽缸导汽管道膨胀收缩受限,导致汽缸受到附加外力作用,应检查管道受限点,需要对管道采取应力释放措施时应做专项分析计算。当排除支吊架偏差和管道附加外力等因素后方可通过调整各猫爪下垫片实施负荷分配试验。
5. 结束语
汽轮机汽缸猫爪负荷分配是一项重要的检修工艺,超出设计标准时汽缸膨胀收缩时受偏转力矩作用,易引起一系列的故障并可能造成严重后果。
传统的汽缸猫爪负荷分配试验及调整计算方法存在诸多的不足,试验工具组件精度低,计算误差大,需多次试验,采用逐步逼近的方式达到设计要求。
猫爪支撑静定结构给负荷分配的调整提供了便利,但猫爪负荷分配垫片调整量计算需要代入负荷相互间的交叉影响,提高计算的准确性,减少试验次数。
汽轮机检修中猫爪负荷分配应首先确认偏差来源,重点关注基础沉降,导汽管道应力释放,支吊架偏离设计值等因素引起的猫爪负荷重新分配,排除支吊架偏差和管道附加外力等因素,方可实施调整猫爪底部垫片来完成负荷分配。