1. 引言
两固体接触面间如何产生一种有效且持久的粘结一直是人们亟待攻克的难题。目前已知的吸附原理可以分为以下4类:机械互锁、真空吸附、毛细力吸附、范德华力吸附。对于机械互锁虽然能够产生较大的吸附力,且安全可靠性高,但往往对吸附装置的强度有着更高的要求 [1]。而真空吸附要求有高的密封性和真空度,对吸附的表面有很多限制,大都只能吸附在较为光滑的表面,且需要有一套负压产生装置配置,这就大大增加了制造成本和运输成本 [2]。毛细力吸附是利用液体的毛细作用依赖于特殊的微纳结构产生的表面张力进行吸附,这种吸附可在湿润的环境下进行,对于微纳领域却有着极其重要的作用。范德华力吸附则是在干燥环境下的吸附,例如壁虎。这种吸附方式同样依赖于特殊的微纳结构。
传统的粘合剂 [3] [4] 在湿润环境下由于表面覆盖一层水膜而失效,这是因为水膜中的水分子阻断了粘合剂分子与固体表面的直接接触。近年来报道的仿树蛙毛脚掌结构表面的粘合剂 [5] [6] [7] [8],利用分子间范德华力在干燥环境下表现出优异的干黏附力。在湿环境下,由于液体的干涉,使得固体表面间的接触受多相耦合作用的影响,大大限制了传统粘合剂的使用环境 [9]。水下粘结对水下工作的抓持机械设备有着重要的意义,可以实现湿环境下对水下物体的捕捉操作转移 [10]。
本论文针对陆生和水生生物,从生物进化角度探讨了其湿黏附的机理。通过对湿润环境下优异功能体表如树蛙脚垫、爬岩鳅等的微纳结构表征,揭示了多级微纳结构对水下粘附的影响机制。基于自然生物体表原型结构以及表面功能机制,研究了面向功能的仿生设计方法。
2. 基于树蛙脚掌的仿生湿粘附机制研究
2.1. 树蛙攀爬实验
要求攀爬的空间为透明方便高速摄像机摄影,且需观察装置封闭,防止树蛙逃逸出来。
实验装置如图1,树蛙被放置在密闭的透明方形盒内,通过替换不同目数的砂纸达到改变表面粗糙度的目的。为了便于观察,在观察对象旁放置白光灯源。随着高速摄像机分辨率(帧数)提高需要增强亮光。攀爬表面分别采用光滑玻璃、50目、500目、5000目四类粗糙度表面,如图2依次对应(a)~(d)。这四类均为具有代表性的表面。
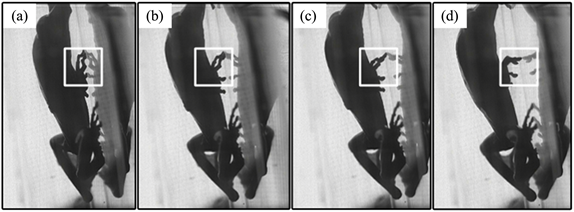
Figure 2. Tree frog climbing posture: (a)~(d) tree frog foot two finger tips from the heel slanting off posture
图2. 树蛙攀爬姿态:(a)~(d) 为树蛙脚掌两个指端由后跟倾斜脱落姿态
在500目和5000目的砂纸上,树蛙脚掌脱落姿态均为由指尖翘起开始脱落,并且这种情况在越粗糙的表面越容易发生。由图3可以看出,在光滑玻璃片上,从脚掌后跟开始翘起的脱落姿态与壁虎等四足爬行动物相似。
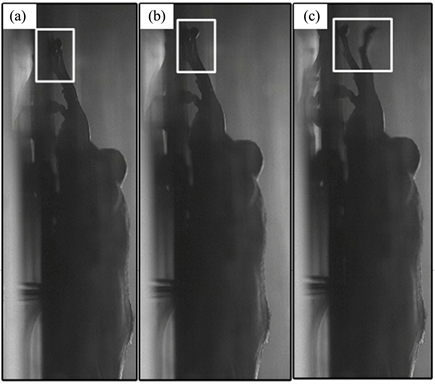
Figure 3. Tree frog’s climbing posture on sandpaper: (a)~(c) for the finger tip cocked off posture
图3. 树蛙在砂纸上攀爬姿态:(a)~(c) 为指端翘起脱落姿态
由以上实验推测,在粗糙表面的特殊的脱落姿态与树蛙脚掌自身自洁性有关。树蛙生活在热带丛林中,脚掌经常会粘黏树叶尘土等杂质,这些杂质不利于树蛙吸附。树蛙能够长期保持黏附是靠脚掌的自洁作用,该实验是模拟树蛙自然状态下的脚掌附着脱落姿态。有助于研究脚掌黏附于自洁性之间的关系;另外根据树蛙脚掌的微纳结构具有微弱的方向性,与树蛙攀爬脱落姿态有关。
2.2. 树蛙脚掌形态表征
如图4所示,从树蛙脚掌的表面结构SEM图中可以看出以下特征:从(b)图可以看出,其表面由外接圆直径为10 μm的多边形组成,这些多边形有四边形,五边形和六边形密排列方式组成,通过统计得出大部分为较为规则的六边形;从(c)图可得到六棱柱拼接处开有沟槽,槽深约5 μm,槽宽约1 μm;从(d)图可明显看出该结构六棱柱较为规则;从(e)图可看出,在纳米级别存在直径约200 nm的纳米柱,这些六边形表面是由纳米柱组成的。

Figure 4. SEM of tree frog feet: (a) Polypedates megacephalus in vivo; (b) micro-scale structure on the surface of tree frog feet; (c) micro-scale structure on the longitudinal section of tree frog feet; (d) magnification of a single hexagonal prism; (e) nano-scale structure on the surface of tree frog feet
图4. 树蛙脚掌SEM:(a) 斑腿泛树蛙活体;(b) 树蛙脚掌表面微米级结构;(c) 树蛙脚掌纵向切面微米级结构;(d) 单个六棱柱放大图;(e) 树蛙脚掌表面纳米级结构
这些结构带给我们仿生树蛙强黏附的微纳结构的启示,从这些特殊的微纳结构中探索其强黏附机理,并根据黏附机理制造仿生表面。
3. 基于爬岩鳅的仿生水下粘附机制研究
3.1. 爬岩鳅的水下粘附的实验研究
如图5所示,爬岩鳅(Beaufortia kweichowensis)生活在湍急的溪流中,平坦的腹部能够稳定的吸附在扁平石头上,避免水流冲走。爬岩鳅体型扁平且较长,腹部平坦与嘴和尾部基部在同一面内,边缘由宽大的胸鳍和腹鳍构成。其远大于自身质量的吸附力是作为研究水下吸附的理想对象。
主要针对爬岩鳅的水下吸附原理进行形态结构分析和流体状态分析,提出爬岩鳅原型生物的水下各向异性强摩擦吸附原理,以此为前提设计出一种基于爬岩鳅的水下仿生各向异性强摩擦吸附装置。此装置可作为机械手前端配件和爬壁机器人吸附前端装置,可应用于军事、机械、海洋、环保等工业生产领域,同样在日常生活中有着非常广阔的应用前景。
3.2. 爬岩鳅水下吸附机理
如图6所示,爬岩鳅起吸附作用的分别是胸鳍和腹鳍,鳍上面有鳍条呈辐射状分布,鳍条之间留有间隙,相邻鳍条由表皮组织膜连接。每根鳍条表面均长满具有方向性的刚毛,排布取向一致,每个部位的刚毛取向与鳍条与爬岩鳅前进方向的夹角有关。每根刚毛宽5 μm,长10 μm,刚毛顶部呈尖端状。

Figure 6. Morphological characteristics of the fin strips of the creeping loach
图6. 爬岩鳅鳍条形态特征
爬岩鳅刚毛尖端约2 μm左右,自然中的岩石均为粗糙表面,表面粗糙度量级在1 μm以上,爬岩鳅刚毛尖端易于伸入粗糙表面凹槽内,达到密封效果。其次,各向异性的微结构,使得爬岩鳅防止在溪流中被冲走。基于这样的爬附机制,提出了一种仿爬岩鳅的水下各向异性的强摩擦与可逆吸附的爬壁末端装置(如图7),它由两个基本单元和驱动模块构成,爬壁方式在于两个及以上的爬壁模块在驱动模块驱动下交替完成吸附和脱附过程,以此完成攀爬动作。

Figure 7. Wall climbing diagram of rock-climbing loach-like device
图7. 仿爬岩鳅装置爬壁示意图
两个爬壁模块具体爬壁过程如下:
初始状态,驱动模块为缩短状态,两个爬壁模块均人为贴附在潮湿竖直基底表面。驱动模块受激伸长,第一级爬壁模块有前进的趋势,第二级爬壁模块有后退的趋势。在各向异性表面织构作用下,第一级爬壁模块受基底表面的摩擦力变小,使得鳍条间角度变小薄膜收缩挤入流体而负压降低;第二级爬壁模块受基底表面的摩擦力变大,使得鳍条间角度变大薄膜展开排除内部流体而负压增大。随着驱动模块伸长,第一级爬壁模块在基底上滑移距离远大于第二级爬壁模块。驱动模块受激缩短,第一级爬壁模块有后退的趋势,第二级爬壁模块有前进的趋势。在各向异性表面织构作用下,第一级爬壁模块受基底表面的摩擦力变大,使得鳍条间角度变大薄膜展开排除内部流体而负压增大;第二级爬壁模块受基底表面的摩擦力变小,使得鳍条间角度变小薄膜收缩挤入流体而负压降低。随着驱动模块缩短,第二级爬壁模块在基底上滑移距离远大于第一级爬壁模块。
此时,完成一个爬壁位移动作,重复以上动作即可连续吸附爬行。
该仿生装置可集成摄像头、传感器、机械手等前端操作感知装置,其工作环境适应于潮湿空气或液体环境中。
4. 结论
通过对陆生生物树蛙在湿润环境攀爬性能的实验以及树蛙脚掌表面结构的表征,表明了六边形结构在湿润环境下具有优良的粘附特性。通过对水生生物攀岩鳅粘附表面结构的表征,发现了方向性摩擦性能与表面方向性结构的关系,从而实现水下环境的吸附和脱附功能,根据这个原理可以设计方向性摩擦表面与特殊运动模态下的柔性仿生爬行机器人。
基金项目
北京工业大学“城市碳中和”科技创新基金。
参考文献
NOTES
*通讯作者。