1. 引言
绝缘子是安装在不同电位的导体或导体与接地构件之间的能够耐受电压和机械应力作用的器件 [1] ,如图1所示绝缘瓷瓶大小伞裙间是污秽聚集区,随着时间的推移,污秽聚集越来越多,严重时整个绝缘瓷瓶会布满污秽,最终发生污闪,造成绝缘事故,进而影响电力系统的正常运行。待清扫的瓷瓶如图1所示。
防止此类事故,传统的瓷瓶清扫措施是不考虑设备实际污秽状态,对瓷瓶采取一刀切方式统一按照固定周期电刷清扫、带电水冲清扫。这种方法造成大量人力、物力、财力的浪费。
为了使盐灰清除的更加彻底,提高盐密取样准确性,同时降低人员劳动强度和登高作业风险。本文主要尝试研制一种全自动、可控且可带电工作、具有高使用价值的绝缘子清扫装置。
2. 绝缘子污秽
2.1. 污秽的种类
绝缘子表面的污秽物种类因为运行环境的不同大致可分为两大种类 [2] :
一、自然环境作用下所产生的,具有明显地域特征,与当地的地理特质有很大关系,即自然环境污秽。常见的主要有:空气灰尘污秽、空气中的盐碱污秽。
二、工业生产过程中产生的,与生产的种类密切相关,称其为地点性污秽,即工业生产污秽;在上述两种污秽种类中,对输电线路运行危害最大的是工业生产污秽。常见的主要有:建筑工程使用的水泥或水泥厂生产造成的污秽、煤碳燃烧造成的烟尘污秽、大气中的金属颗粒污秽、化工生产造成的污秽。
2.2. 污秽的危害
通过众多电网事故调查表明,大面积污闪事故始终是导致我国电网大面积停电的首要原因 [3] 。随着我国国民经济的快速发展,我国的环境污染日趋突出;另一方面,电网的扩大也使得污闪事故的覆盖范围逐渐增大。
绝缘子污闪事故(如图2所示)严重威胁电力系统的安全可靠运行。绝缘子闪络电压与盐密、灰密及雾水电导率有着密切的关联。
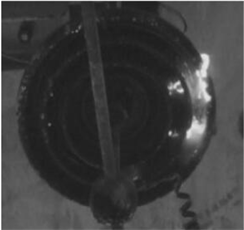
Figure 2. Insulator pollution flashover accident
图2. 绝缘子污闪事故
在这种气候之下,220 kV变电站中的高压绝缘子长期运行在恶劣的户外环境,表面很容易沉积大量的污染物,潮湿环境下绝缘强度会急剧降低,产生很大的泄漏电流,严重时引发污闪事故,导致供电中断,给电力系统的安全稳定造成严重的影响。其中,盐密是反映污秽物导电性能的数值,灰密是反映污秽不溶物体质量的数值;盐密/灰密值是瓷瓶污状况最直接的反映。为了便于叙述,文中一律用盐密值代盐密/灰密值。湖北地区绝缘子污秽等级介于C~D之间,绝缘子盐密在0.06 mg/cm2以上 [4] 。
3. 绝缘子清扫作业研究现状
目前绝缘子清扫作业主要分为三种措施,分别是停电人工清扫、带电气吹清扫、遥控机器人。
1) 停电人工清扫。不考虑设备实际污秽状态,对瓷瓶采统一按照固定周期停电人工清扫,传统的瓷瓶清扫方法造成大量人力、物力、财力的浪费,而且也致使设备健康程度不高 [5] 。
2) 带电气吹清扫。带电气吹清扫瓷瓶污秽,其原理如图3所示,是利用空气压缩机产生的高压气流和高速运动的木质辅料(锯末)在瓷瓶上撞击而使污秽自动脱落 [6] 。

Figure 3. Principle diagram of electric blowing
图3. 带电气吹原理图
为了保证在带电气吹时的人身及设备安全,必须对操作杆、绝缘软管进行电性能试验。此外,采用带电气吹法难以清除陈旧型油污且极易破坏瓷瓶表面釉油。
3) 遥控机器人 [7] 。上海交通大学于2006年提出了一种遥控机器人HVCR-II,其结构简图如图4所示。用于带电清扫330 kV高电压设备的外绝缘瓷瓶,工频耐压试验和模拟带电清扫试验表明,其绝缘性能满足超高压带电清扫作业规程,清扫效果满足设计要求。但该设备造价成本较高,由于机器车身体积大而无法抵达部分指定的清扫作业现场。

Figure 4. Structural sketch of cleaning robot
图4. 清扫机器人结构简图
4. 新型瓷瓶清扫器设计
4.1. 绝缘子尺寸
绝缘子种类繁多,形状各异。可以按安装方式、绝缘材料、使用电压等级、使用的环境条件使用电压种类、特殊用途等方式对绝缘子进行分类。不同类型绝缘子的结构和外形虽有较大差别,但都是由绝缘件和连接金具两大部分组成的。图5是两种不同结构尺寸的瓷瓶,也是本文清洁器清扫的对象,图中瓷瓶(a)整体高度约140 cm,小伞直径约26 cm,大伞直径约34 cm;瓷瓶(b)整体高度约400 cm,伞直径由下而上逐渐减小。
 (a)
(a)  (b)
(b)
Figure 5. Insulators of two different sizes
图5. 两种不同尺寸的瓷瓶
为了绝缘子污秽的进行更好的清理以及考虑目前清扫作业的种种弊端,需研制一种可降低盐灰密度数据误差、取样简便快捷、能高效清扫的瓷瓶污秽带电式取样器。
该绝缘子清扫装置的主要分成三个部分:动力控制与传动系统、由特殊绝缘材料制成的清洁刷头、吸尘收集系统。
如图6所示,为该绝缘子清扫装置的侧视图模型和正视图结构图。

Figure 6. Structural diagram of insulator contamination sampler
图6. 瓷瓶污秽取样器结构图
其中,1为传动杆;2为清洁刷头;3为动力及控制基座;4为移动滚轮;5为传动杆基座;6、7、8、9为毛刷转盘。
4.2. 动力控制与传动系统的设计
4.2.1. 动力控制系统
动力及控制部分封装在一个基座内与传动杆连接。由控制电路、电机及传动装置和升降装置组成,该部分负责实现刷头升降、控制刷头转速等功能。
作为整个装置的基座与核心,起提供动力并控制各部分机械运行等功能,其通过内部电机转动产生动力,转速受控于控制电路。主控板搭载电源模块、显示屏、微处理器、PWM输出电路、滤波电路、编码器、光电耦合隔离器和电机驱动电路等外围电路,微处理器控制PWM输出电路产生驱动信号控制电机驱动电路驱使电机转动,在经过编码器采样反馈到MCU进行负反馈调节电机转速 [8] 。
如图7所示,是以型号为STM32F103RBT6的微处理器为核心的控制电路原理图;所述编码器采用高达888线AB相光电编码器;所述光电隔离器型号为LTV352。
4.2.2. 传动系统
传动部分由传动零件和绝缘杆组成。传动零件以棒芯的形式安装在绝缘杆内部使整个传动部分具有伸缩功能,其伸缩的长度受控于动力及控制部分,杆的一端的形状可以与动力及控制部分基座的凹槽形状相吻合,另一端与刷头的金属连接底座通过螺丝连接,该部分负责将电机转动传递给刷头,使其旋转;最后,刷头部分由四个刷盘、齿轮、连接锁、金属连接底座和U型板(如图8所示)构成。外部杆采用绝缘材料包覆,具有良好的绝缘特性 [9] 。
该装置具有绝缘水平高,清扫能力强,操作方便,易于控制等特点。

Figure 7. Control circuit schematic diagram
图7. 控制电路原理图

Figure 8. Physical picture of U-shaped plate
图8. U型板实物图
4.3. 绝缘材料的选择
对变电站绝缘子进行清扫作业时,清扫装置的绝缘性能作为人身基本安全的一项重要指标显得极其重要 [10] 。故需要对清扫装置的材料进行谨慎选择。
4.3.1. 毛刷材料
毛刷的材料需要兼顾绝缘与适于清扫污秽两项功能,选择人造橡胶丝作为毛刷的制造材料。该种人造橡胶丝具有韧性强、弹性强、绝缘性能好、不易变形、不易断毛、耐潮湿、耐高温、不受冷热影响等特点 [11] 。
4.3.2. 刷头的设计
因为待清扫的瓷瓶尺寸比较大,采用双刷头的清洁头。若清扫尺寸比较小的瓷瓶,可以适当提高刷头的数量。
刷头的设计原则 [12] :
1) 清扫方便,即能自动调节角度和转速;
2) 刷头尺寸应与大小伞间隔吻合;
3) 刷头可更换,以适应不同瓷瓶清扫需要;
按照上述原则,设计的刷头如图9所示。
4.3.3. 绝缘杆
绝缘杆采用的材料是玻璃钢材质(Fiber Reinforced Plastics),杆与杆之间为接扣式。具有轻质高强、耐腐蚀、绝缘性能好等优势 [13] 。需要根据瓷瓶的电压等级确定相应的绝缘杆长度,其中适合110 kV变电站的是2米杆,220 kV变电站的是3米杆。其实物图如图10所示。
4.3.4. 收集装置的设计
在清洁头的末端根据相应的收集装置的物理结构,设计相应形状的污秽收集盒,清扫器结构示意图如图11所示。通过强力的吸尘作用,使清扫刷毛上附着的污秽尽可能的落入收集系统中。清扫系统结构图如图12所示。

Figure 12. Structural schematic diagram of cleaning system
图12. 清扫系统结构示意图
5. 清扫效果分析
5.1. 模拟环境下的清扫
为了验证清洁器的清扫效果,选取退役绝缘瓷瓶进行清扫,即在绝缘瓷瓶不带电的情况下对其进行清扫、取样、测量,避开产生误差的多个环节,得到的盐密数据精度高,操作简便,可以减少作业人数、节省大量工作时间、降低工作量和成本,能准确验证瓷瓶污秽取样器的取样效果。
运用瓷瓶污秽取样器与传统清扫方式(电刷清扫、带电水冲清扫)对瓷瓶在不带电情况下进行污秽取样,并进行清扫、取样对比。如表1所示。

Table 1. Comparisons of two cleaning modes under non-power condition
表1. 不带电状况下两种清扫方式对比
由以上可知,采用瓷瓶污秽取样器对瓷瓶在不带电环境下进行清扫、取样,与传统方式相比,瓷瓶饱和盐密值较为接近,验证了瓷瓶污秽取样器清扫、取样的准确性,且污秽清理效果更好。
5.2. 实际环境下的清扫
如图13所示,在带电环境下,通过瓷瓶污秽取样器对运行线路上的污秽瓷瓶进行清扫、取样、测量,收集到的污秽与不带电时瓷瓶污秽取样器收集到的污秽进对比,进而得到可以直观的看出瓷瓶污秽取样器在实际清扫过程中的效果。如表2所示。

Figure 13. Cleaning of ceramic contamination processor in practical environment
图13. 实际环境下瓷瓶污秽处理器清扫工作
Table 2. Comparisons between actual and simulated environments of insulator contamination samplers
表2. 瓷瓶污秽取样器实际环境与模拟环境下对比
由上可知,采用瓷瓶污秽取样器对瓷瓶在带电环境下进行清扫、取样,与不带电环境相比,瓷瓶饱和盐密值较为接近,验证了瓷瓶污秽取样器获污秽清理效果好,获取盐密数据精度高。同时,带电操作时由于涉及到安全操作等方面的原因,清扫时间相对于不带电会略有所增加,最终使整个清扫成本增加,但其成本仍远低于传统清扫成本,且可随时进行,操作简便、工作量小,不受线路限制。
6. 盐密误差分析
盐密是反映污秽物导电性能的数值,常用盐密值指导绝缘子清扫,确定清扫周期。根据盐密饱和理论 [14] ,瓷瓶在湖北地区需积污满3年其盐密值达到饱和。因此,在抽取积污瓷瓶时,需选取能够较好反应污秽状况的瓷瓶。
6.1. 不带电状态下盐密误差分析
对瓷瓶不带电状态下传统人工法与污秽取样器法进行盐密误差分析。考虑到传统人工清扫由于没有直接对运行瓷瓶进行污秽取样的工具。因此,在停电状态下取下积污瓷瓶,获取盐密值。由于传统人工清扫中,取盐密瓷瓶、搬运瓷瓶、擦拭瓷瓶过程会造成盐密损失 [15] ,故应对其进行误差分析。
1) 取盐密瓷瓶。在将瓷瓶从杆塔上取下的过程中会不可避免地破坏瓷瓶表面的污秽;此时,破坏的表面积即为污秽的损失。现对已取回的盐密瓷瓶进行统计,计算出破坏面积占瓷瓶总面积的百分比如表3所示。可以得到的破坏面积占瓷瓶总面积的百分比的平均值在5%。
Table 3. Percentage of damaged area
表3. 破坏面积占比
2) 搬运瓷瓶。由于搬运瓷瓶过程会造成瓷瓶表面污秽的损失。为估算盐密损失,传统方式是采用模拟的方式,将积有污秽的瓷瓶置于清洁白纸上并放在汽车内,经过一定路程的运输和颠簸后将瓷瓶在纸上原地搬放两次,模拟实际的搬、运过程;最后,搜集纸上的落灰并进行盐密测量,将所得数据与原瓷瓶污秽数,实验的得到的平均误差在2%左右(表4)。
Table 4. Dense proportion of falling ash salt
表4. 落灰盐密占比
3) 擦拭瓷瓶。针对污秽擦拭过程中出现的误差,通常可以认为对已擦拭过的盐密瓷瓶二次擦拭,测量剩余盐密,并与初次获得的盐密值进行对比,从而获得误差数据,通常可以接受的平均误差在3% (表5)。
Table 5. Ratio of residual salt density
表5. 剩余盐密占比
6.2. 污秽取样器盐密误差分析
现对不同悬挂点下的两个瓷瓶,采用污秽取样器在带电与不带电情况下分别进行盐密值测量。
由表6可知,瓷瓶污秽取样器在带电情况下的测量平均误差约为2.275%。如图14所示,结合表1~5的数据,得到两种清扫方式的盐密误差对比图。观察可发现,污秽取样器清扫得到的盐密误差远远小于传统人工清扫的误差。因次,采用带电操作下污秽取样器的盐密值作为制定变电站瓷瓶清理周期的参数更为精确。
Table 6. Comparison of salt density
表6. 盐密情况对比
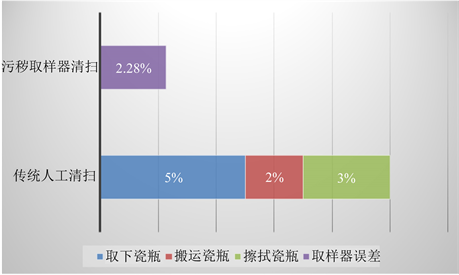
Figure 14. Comparison of salt density errors between two cleaning methods
图14. 两种清扫方式的盐密误差对比图
7. 结语
基于目前变电站绝缘子长期受盐灰污垢的影响,造成绝缘性能降低、老化速度加快等问题,特研制一种瓷瓶污秽带电擦拭取样器,降低盐灰密数据误差、取样简便快捷准确,以此减少清扫的人力成本,减少停电的负荷损失。该项目对实现变电站绝缘子清扫和绝缘子盐密收集的自动化、高效化、安全化、准确化具有很重大的意义。