1. 引言
自从Hopfield [1] 在1984年提出他名字命名的Hopfield神经网络以来,这类人工神经网络在很多方面得到了广泛的应用,如组合优化 [2] [3] [4] ,图像处理 [5] [6] ,模式识别 [7] ,信号处理 [8] ,通讯技术 [9] 等等,所以在过去的数十年中,Hopfield神经网络被持续研究 [10] - [23] 。由于在神经网络的实际应用中,一方面由于两个神经元之间信息传递不免存在时滞,另一方面由于受到诸如有限的开关速度等硬件的影响,时滞现象也是不可避免的,在神经网络研究中引入时滞得到了广泛的关注 [15] - [22] 。
人们在Hopfield神经网络的研究中所采用的方法通常是利用构造李亚普诺夫函数并结合线性矩阵不等式来分析系统的稳定性。无疑,李亚普诺夫方法是微分方程稳定性研究的利器,但是如何构造适当的李亚普诺夫是解决问题的关键,也是一个难题,另外,同一个系统,构造不同的李亚普诺夫函数,得到的稳定性范围也可能不相同,而且线性矩阵不等式的运算也很繁琐。
Gronwall不等式在微分方程定性理论研究中也发挥极其重要的作用,并且得到不断的推广和广泛应用 [23] - [38] ,但是用于研究神经网络系统的稳定性比较少见。
本文利用Gronwall积分不等式研究对如下对Hopfield时滞神经网络模型的稳定性问题。
(1)
其中
表示神经元的状态变量,
表示激活函数,
为时滞项激活函数,
(
),
,
,分别表示对应神经元的连接权重系数矩阵,其中,ai表示第i个神经元的自反馈强度,
表示第j个神经元的输出
对于第i个神经元的输入的反馈连接强度,如果第j个神经元的输出使第i个神经元激活(或抑制),则
(或
);
类似。τ表示传输时滞,为某一正常数。
这里我们定义n × n矩阵
和n维向量
的范数为:
,其中,
表示
的最大特征值,
。
我们假设激活函数f满足李普希兹条件:
。
由于系统(2)的激活函数f满足李普希兹条件,所以存在唯一平衡点,这在很多文献已经做了证明 [15] - [20] ,这里不再重复。令系统(2)的平衡点为x*,设
。那么系统(2)可变为
,(2)
其中,
,其它各个符号的含义与系统(1)相同。
引理(Gronwall不等式) [24] :设K为非负常数,u(t)和g(t)为在区间
上的非负连续函数,且满足不等式
则有
.
2. 稳定性分析
2.1. 无时滞的情形分析
考虑系统
(3)
系统(3)的线性系统为
(4)
基解矩阵为
,
设初值
时,对应初值为
,那么系统(4)的解可以表示为
,取范数
,做以下记号:
I)
,显然,M > 0。
II)
。
可得
。
定理1:激活函数
满足利普希茨条件下,当
时,系统(3)的零解是全局指数稳定的。
证明:设Y(t)为方程(4)的解,由常数变易法得方程(3)的解可以表示为
,实际上,这里
,两边取范数
两边同时乘以
,可得
根据引理1 (Gronwall不等式)得
两边同时除以
,得
,由已知条件
,可得系统(3)的零解是全局指数稳定的。定理得证。
2.2. 具有时滞的情况分析
设
(5)
系统(3)可以表示为
(6)
设初值
时,对应初值为
,系统(6)的解为向量函数
,设
(>0)那么由定理1可得
(7)
定理2:激活函数
满足利普希茨条件下,当
时,系统(2)是全局指数稳定的。
证明:由(5)式,系统(2)改写为
(8)
当
时,对应初值为
,方程(8)的解可以表示为
两边取范数,有
两边同时乘以
,可得
根据引理1 (Gronwall不等式)得
所以
,由于
,所以系统(8)即时滞系统(2)是全局指数稳定的。
3. 数值仿真
这一节,我们用一个实际例子来验证定理结果的有效性。
例1:考虑如下无时滞二维神经网络模型:
(9)
其中,激活函数
,
,显然满足李普希兹条件,并且
,
显然,如果我们取
,
,那么,
,
,
,当
时,初值取
,状态轨线图如图1所示,系统(9)的零解是指数稳定的。

Figure 1. The state rail diagram of system (9) (
)
图1. 系统(9)的状态轨线图(
)
如果我们取
,
,那么
,
,
,当
时,初值取
,状态轨线图如图2所示,此时系统(9)是稳定的,但不是指数稳定的。
例2:考虑如下无时滞二维神经网络模型:
(10)
其中,激活函数
,
,显然满足李普希兹条件,并且
,
如果我们取
,
,
,时滞
,那么,
,
,
,
,
,根据定理2,系统(10)的零解是指数稳定的,当
时,初值取
,系统状态轨线图如图3所示。
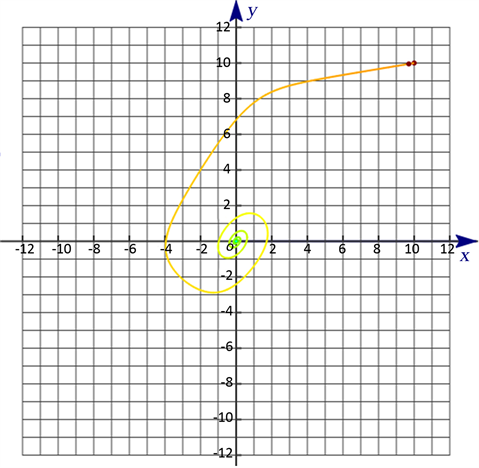
Figure 2. The state rail diagram of system (9) (
)
图2. 系统(9)的状态轨线图(
)

Figure 3. The state rail diagram of system (10) (
)
图3. 系统(10)的状态轨线图(
)

Figure 4. The state rail diagram of system (10) (
)
图4. 系统(10)的状态轨线图(
)
如果我们取
,
,
,时滞
,那么,
,
,
,
,
,当
时,初值取
,系统的状态轨线图如图4,显然此时系统(10)是稳定的,但不是指数稳定的。
基金项目
广西自然科学基金项目(2016GXNSFAA380125, 2016GXNSFAA380090)。