1. 引言
机床运行总会有振动,机床振动严重影响零件的使用性能,加工表面粗糙度,降低了生产效率的提高;刀具易磨损崩刃,降低了刀具的使用寿命,破坏了机床的连接特性;同时机床产生噪声污染,危害人体健康。当满足一定振动条件时,切削振动会发展成切削颤振 [1] [2] 。因此,控制机床振动,提高加工精度和生产效率,成为国内外学者研制的热点 [3] 。近年来,磁流变液这种新型智能材料迅猛发展,以其独有的磁流变效应,粘度可控可逆且变化范围广,响应迅速,广泛应用于汽车领域、机器人领域、振动控制领域、精密加工领域,发展前景十分广阔。
磁流变液是智能材料的重要分支之一,可以液固态间快速转换,且变化可逆,消耗能量低,响应速度快,一般为几毫秒,表观粘度发生变化过程是连续、无级、线性的,具有可控制的流变性。研究实践表明:对磁流变减振装置进行合理结构设计和控制系统分析,可以有效提高磁流变液产生的阻尼力、扩大阻尼调节范围 [4] [5] [6] 。磁流变液可用于智能阻尼器,即磁流变液减振器,制成阻尼力连续顺逆可调的新一代高性能、智能化减振装置。磁流变减振器具有出力大、能耗低、响应迅速、耐久性好和性能连续可调等优点,在车辆、机械、建筑及医疗等领域的应用前景十分广阔,因此也非常适合应用于机床减振系统。
2. 磁流变减振装置结构设计及实验结果
2.1. 磁流变减振装置结构设计
本文设计的磁流变减振装置主要应用在XD-30A立式数控铣床上,主要对铣床的颤振进行抑制。本文确定在立式数控铣床底部四角的位置安装磁流变减振装置,其安装示意图如图1所示,图2为该装置的结构原理图。
2.2. 磁流变阻尼器力学性能测试实验及结果
磁流变液阻尼器的力学性能测试实验在拉压实验机上完成。按力 与位移
与位移 的关系式:
的关系式:
 (1)
(1)
力 与速度
与速度 的关系式:
的关系式:
 (2)
(2)
用式(1)拟合实测的力–位移曲线(或者用式(2)拟合实测的力–速度曲线),便可以得出 和
和 的拟合值。
的拟合值。

Figure 2. Magnetorheological damper structure schematic diagram
图2. 磁流变阻尼器结构原理图
此实验结果表明:此磁流变阻尼器实测数据和拟合曲线基本吻合,能够满足振动控制系统的功能要求(图3、图4)。
3. 磁流变减振装置的工作原理及测试实验
3.1. 磁流变减振装置的工作原理
在数控机床和振源之间用阻尼装置连接,使振源产生的大部分能量由减振装置吸收,来减少数控机床对振源的干扰。
本文针对精密机床进行减振,其振源来自地基。假设地面做简谐振动,其位移为 ,减振系统模型如图5所示。
,减振系统模型如图5所示。
考虑该振动向机床的传递,则机床系统的运动方程为:
 (3)
(3)
式中,m为机床的质量, 为机床在竖直方向的加速度,c为减振器等效粘性阻尼系数,k为减振器的弹性刚度,
为机床在竖直方向的加速度,c为减振器等效粘性阻尼系数,k为减振器的弹性刚度, 为机床在竖直方向的速度,y为机床在竖直方向的位移。
为机床在竖直方向的速度,y为机床在竖直方向的位移。
整理上述公式,可得:
 (4)
(4)
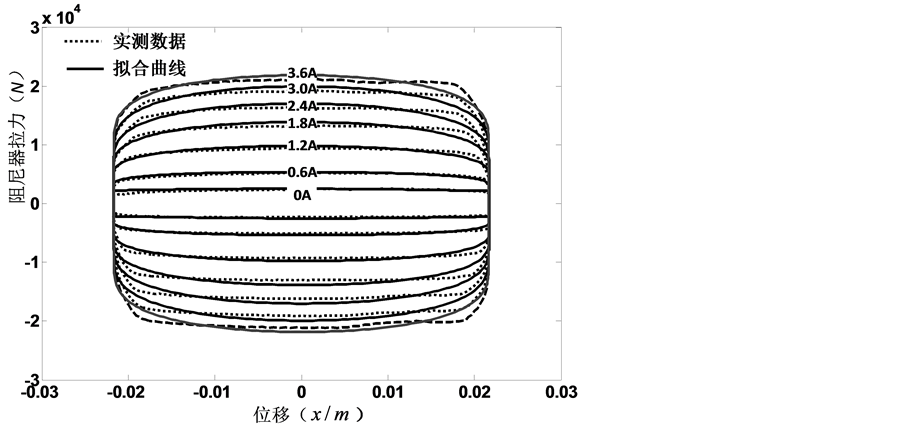
Figure 3. Pulling force-displacement measured data point and curve fitting
图3. 拉力–位移实测数据点和拟合曲线
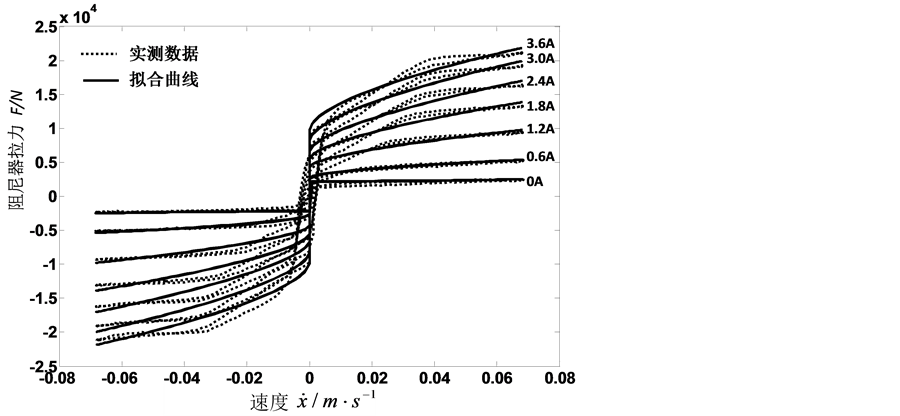
Figure 4. Pulling force-speed measured data point and curve fitting
图4. 速度–位移实测数据点和拟合曲线

Figure 5. The system of machine tool vibration model
图5. 机床减振系统模型
其中, ,
, 为阻尼比,
为阻尼比, 为固有角频率。
为固有角频率。
 (5)
(5)
 为减振系数,
为减振系数, 为减振装置所隔离振动的百分率。
为减振装置所隔离振动的百分率。
3.2. 磁流变减振测试实验
本文所用的是自主研发的测试系统试验台。其测得的实验数据如下图6所示。
从图6、图7可知,磁流变减振器的激振频率在0 Hz~100 Hz的范围内减振前后振幅明显改善,效果良好,基本趋于平稳;减振效率很高,达到了83.71%,减振效果良好。
4. 基于磁流变阻尼减振器的机床系统控制策略
磁流变减振器具有非线性和建模困难的缺点,而模糊控制正好适合非线性,强耦合,建模困难或无法建模的系统控制 [7] 。所以本文把模糊控制技术应用在磁流变机床减振系统半主动控制中是很有必要的。
4.1. 模糊控制的基本原理
模糊控制是计算机数字控制系统的一种,其中模糊控制器是模糊控制系统设计的核心。包括模糊化、模糊推理、解模糊三个流程 [8] [9] [10] 。
4.2. 磁流变阻尼机床减振系统模糊控制器设计
磁流变阻尼机床减振系统至少需要测量速度或非速度和相对速度这二个信号,因此,一方面,测试相对位移,一方面测试加速度,这二方面都要小(图8)。测试相对位移模糊输入量设为 ,响应值为
,响应值为 ,其误差变化
,其误差变化 ;测试加速度
;测试加速度 ,响应值为
,响应值为 ,其误差变化
,其误差变化 。模糊输出量为磁流变机床减振系统阻尼器输出的阻尼力 [11] [12] [13] [14] [15] 。模糊控制器的设计如下:
。模糊输出量为磁流变机床减振系统阻尼器输出的阻尼力 [11] [12] [13] [14] [15] 。模糊控制器的设计如下:
1) 输入输出变量的正规化处理
根据实际中相对位移和加速度最大幅值及阻尼力输出幅度确定误差,可得 。
。
2) 定义模糊集合及其隶属函数
输入量  的模糊状态表示为{负大,负中,负小,零,正小,正中,正大},即{NB,NM,NS,Z,PS,PM,PB}七个模糊集合;输出
的模糊状态表示为{负大,负中,负小,零,正小,正中,正大},即{NB,NM,NS,Z,PS,PM,PB}七个模糊集合;输出 模糊状态表示为{零,小,小中,中,小大,中大,大},即{Z,S,SM,M,SB,MB,B}。设
模糊状态表示为{零,小,小中,中,小大,中大,大},即{Z,S,SM,M,SB,MB,B}。设 的模糊状态变量分别为Ai1~Ai7,Bi1~Bi7,Ci1~Ci7。选择
的模糊状态变量分别为Ai1~Ai7,Bi1~Bi7,Ci1~Ci7。选择 的七个模糊语言值的隶属函数为正态型模糊变量。其正态隶属函数为
的七个模糊语言值的隶属函数为正态型模糊变量。其正态隶属函数为
 (6)
(6)
式中参数 反映隶属函数曲线的形状,参数
反映隶属函数曲线的形状,参数 表示隶属函数的位置。
表示隶属函数的位置。
3) 设计模糊控制规则集
这一部分是是模糊控制器设计的关键。设模糊控制规则集 为:
为:
If  is
is  and
and  is
is  then
then  is
is  (
( ;
; )。
)。
4) 模糊推理和去模糊化
本文采用Mamdani推理法min-max-重心法进行模糊推理和去模糊化方法,对于测试相对位移,给定模糊规则集
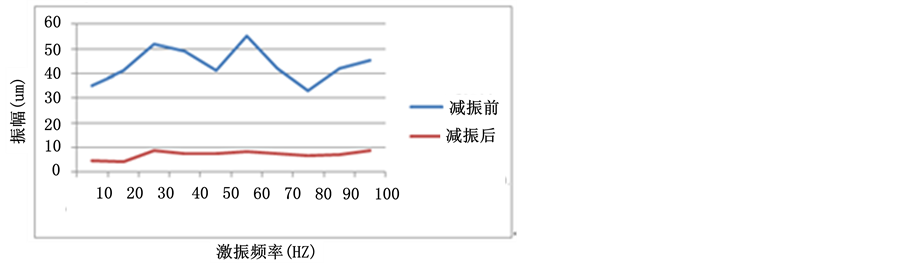
Figure 6. Contrast figure of magneto-rheological damper vibration data before and after
图6. 磁流变减振器减振前后数据对比
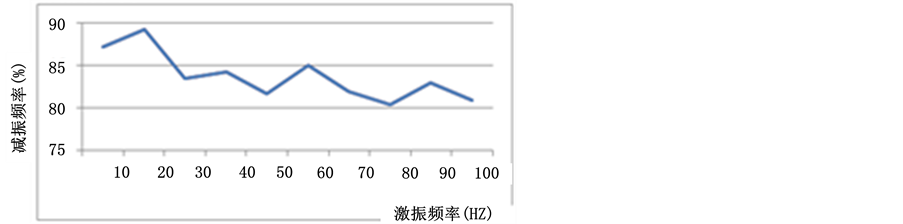
Figure 7. Isolation efficiency of magneto-rheological damper vibration
图7. 磁流变减振器隔振效率
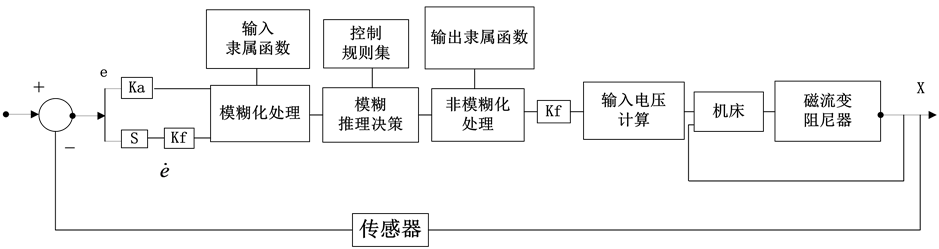
Figure 8. The fuzzy control algorithm of the magneto-rheological damper machine tool vibration
图8. 磁流变阻尼机床减振模糊控制系统
R1: If  and
and ,then
,then 
R2: If  and
and ,then
,then 
……
Rn: If  and
and ,then
,then 
现在已知前提条件: and
and ,可得模糊集
,可得模糊集 的重心公式:
的重心公式:
 (7)
(7)
式中 为
为 ,各语言变量模糊子集的中心位置。
,各语言变量模糊子集的中心位置。
同理可得测试加速度方面的模糊集 的重心公式:
的重心公式:
 (8)
(8)
由公式(7) (8)模糊控制器的精确控制量,通过输出控制量的比例因子 即可确定输出的阻尼力。
即可确定输出的阻尼力。
4.3. 实验结果分析
实验结果证明,幅值减小了28.8%,均方根减小了20.7%,以磁流变减振器为中心的减振装置,在模糊控制算法的作用下,确实起到了减小质量块振幅的作用(表1),效果显著,因此通过磁流变减振器对机床减振系统进行半主动控制,采取模糊控制算法,可以实时调整系统的阻尼比,达到良好的减振效果(图9)。
5. 结论
为了抑制机床振动,本文研制了可用于机床的磁流变减振装置,并利用模糊控制算法对该装置进行了基于磁流变阻尼减振器的机床系统控制研究。结果表明:对于本文设计的磁流变减振装置,减振前后振幅明显改善,效率达到了83.71%,减振效果良好。在模糊控制算法的作用下,确实减小了质量块的振幅作用,效果显著。

Table 1. With no control algorithm parameter list
表1. 有无控制算法参数表
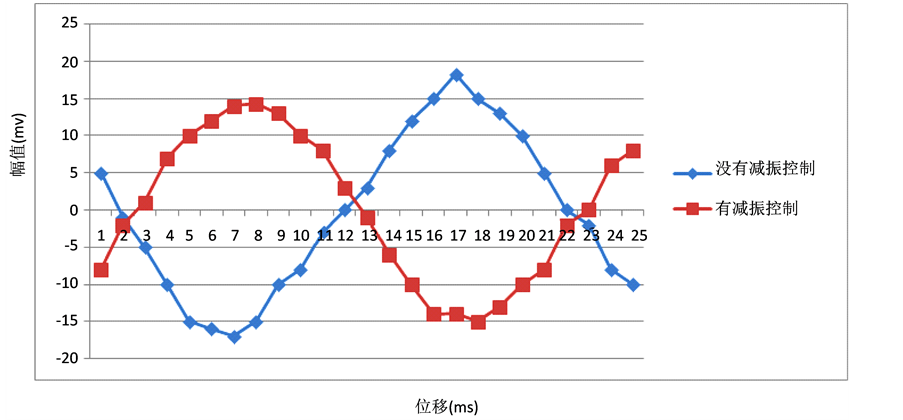
Figure 9. Machine tool system displacement wave shape
图9. 机床系统位移波形
致谢
感谢长春理工大学光电信息学院所有老师和同学们给予的大量的帮助,为我解决了许多实验条件上的困难,在此向他们表示感谢!
基金项目
吉林省教育厅“十二五”科学技术研究项目([2013]532号、[2013]533号)。