1. 引言
风洞是以人工的方式产生并且控制气流,用来模拟飞行器或实体周围气体的流动情况的实验设备,是航空领域、空气动力学研究的重要手段;而风速控制是风洞中最核心的部分,一个风洞的试验段风速是否能够快速、稳定的达到目标值将直接影响到风洞试验和测量结果的准确性 [1] 。对于亚声速风洞也是如此,由于亚声速风洞有着风速范围宽、控制精度高、调节速度快等控制要求,采用常规PID风速控制策略难以完成对亚声速风洞风速的快速、精确控制 [2] 。所以本文针对亚声速风洞的特点,采用双极对旋风机作为风洞动力段的驱动风机,并根据风速区间设计了一种分段式风速控制策略,保证各个工况条件下的风速需求,为亚声速风洞试验提供必要的试验条件。
2. 研究对象简介
为了满足亚声速风洞的风速需求,亚声速风洞动力段的驱动电机采用双极对旋风机。双极对旋风机是一个由两个相同型号的风机串联在一起,两个风机的叶轮紧密排列的特殊轴流风机,其结构示意图如图1所示。在工作时两极风机的旋转方向相反,从而可以产生符合动力段出口要求的轴向气流。双极对旋风机产生的风压大于单个风机风压的两倍以上,具有高效、高压、安装空间较小、采购费用较低等优点,非常适合用于亚声速风洞 [3] [4] 。
 1——支撑板;2——叶轮;3——两极电机
1——支撑板;2——叶轮;3——两极电机
Figure 1. Schematic diagram of bipolar cyclone structure
图1. 双极对旋风机结构示意图
双极对旋风机具有多种工作方式,可以根据亚声速风洞各个工况条件下的风速、风压需求,采用前后极风机同步旋转、前后极风机差速旋转、以及前置风机旋转带动后置电机旋转等方式,通过不同的工作方式满足不同工况下的风速需求。
3. 风速控制系统原理及组成
3.1. 闭环风速控制系统原理
风速控制系统的输入量为电机转速、输出量为试验段风速。风速控制系统通过改变电机转速驱动风扇桨叶旋转,在经过扩散段、拐角、等直段、收缩段等部段的能量传递过程之后,才能影响到风洞试验段的风速;当试验段风速收到干扰时,风速控制系统需要通过差压传感器等测量设备传递过来的信号才能接收到干扰产生的影响。针对这种滞后性较高的控制系统,需要通过闭环风速控制系统对风速进行控制。
闭环风速控制系统的原理如图2所示:
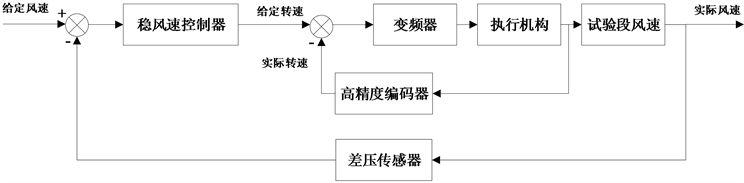
Figure 2. Schematic diagram of closed-loop wind speed control system
图2. 闭环风速控制系统原理图
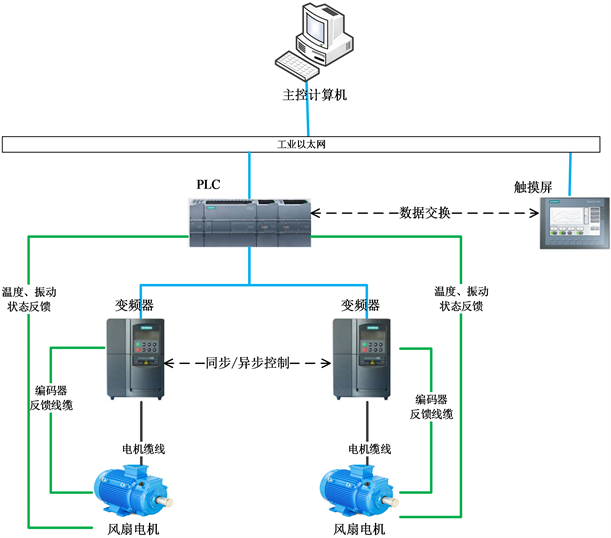
Figure 3. Composition diagram of wind speed control system
图3. 风速控制系统组成图
3.2. 风速控制系统组成
根据亚声速风洞的实际需求,风速控制系统组成主要为:高压变频器、变频电机、高精度编码器、网络控制模块、可编程控制器(PLC)以及主控计算机等。各种参数由主控计算机的人机界面输入和显示,通过PLC控制变频器对变频电机进行调速。风速控制系统的设备组成图如图3所示。
其中主控计算机与PLC之间采用以太网通讯,PLC向变频器传递命令信息(包括风机启动/停止、转速/频率设定、同步/异步指令、电机命令输出、电机启动延时等),同时读取变频器状态(差压传感器风速反馈、编码器电机转速反馈、电机轴承及绕组温度反馈等)。
4. 风速控制策略研究
由于双极对旋风机有多种工作模式,为了能够使亚声速风洞保持较为安全、合理、高效的经济运行状态,根据亚声速风洞试验时的实际风速、风量需求,设计分段风速控制策略来驱动双极对旋风机。
分段控制策略是指在启动时根据设定风速的不同,选择对应的工作方式启动对旋风机,使得风速逐渐达到设定值;当风速接近设定值后利用基于常规PID或者专家PID的风速控制策略调节风速,使风速快速稳定。下面分别对低风速状态(0~60 m/s)以及高风速状态(60 m/s~238 m/s)的风速控制策略进行研究
1) 低风速状态
在低风速状态下,为了减少用电量损耗,延长风机的使用寿命,采用只驱动前置电机的控制策略。低风速状态下的风速控制原理图如图4所示:
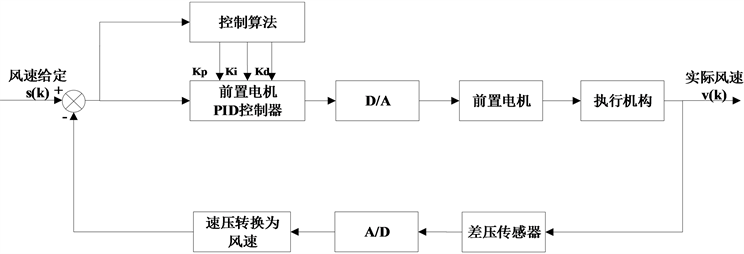
Figure 4. Schematic diagram of wind speed control under low wind speed conditions
图4. 低风速状态下的风速控制原理图
PLC接收主控计算机输入的给定风速值,控制前置电机变频器对前置电机进行调速;在风洞内设置差压传感器,用于测量风洞试验段的静压并反馈给PLC,通过计算得到亚声速风洞试验段的实际风速,从而判断实际风速是否与给定风速相同。考虑到在此状态下,控制对象单一、风速需求较低,所以使用常规PID对前置电机进行控制。
在PLC中建立PID控制器,通过PID控制器调节前置电机,保证风速稳定。具体的调节方式如下:
根据差压传感器测量出试验段的实际风速,然后计算出k时刻的实际风速
与给定风速
之间的偏差量
。
在k时刻,实际风速
与给定风速
的偏差量
的值为:
在
时刻,偏差量
的值为:
则k时刻与
时刻的偏差量的误差
为:
通过下面的常规PID控制公式对前置电机进行调节,使得实际风速尽快达到给定风速,逐步消除偏差:
其中,t为采样时间,
代表第j时刻的偏差量,通过不断调节比例调节系数
、积分调节系数
和微分调节系数
,来不断的提高系统的调节精度,使得偏差量
小于给定风速的0.1%。
2) 高风速状态
在高风速状态下,为了提高双极对旋风机的工作效率,保护双极对旋风机安全、可靠运行,采用两极电机绝对同步的控制方式,保证双极对旋风机的两极叶片实现同步运行。
具体同步流程如下:
a) 主控机计算机发布同步命令,启动前置电机和后置电机之间的同步运动。前置电机作为主轴,在接收到主控机计算机的开始运动指令后按照指定转速转动。
b) 前置电机开始转动后,后置电机按照PLC中设置的加速度等参数进行加速运动,追踪前置电机的速度。
c) 当前置电机速度与后置电机速度达到一致时,代表后置电机与前置电机实现速度同步,两电机以相同的转速运行。
d) 两电机同步运行后,通过控制策略调节风速。
双极对旋风机的同步时序图如图5所示:

Figure 5. Synchronous timing diagram of bipolar pair cyclone
图5. 双极对旋风机同步时序图
由于在此状态下风速较快、电机转速较高、且需要同时调节两台电机的参数,考虑到常规PID控制虽然结构简单、调节方便,但当控制对象较多且过程复杂时常规PID难以进行有效的控制,所以为了能够保证双极对旋风机在高风速状态下安全、可靠的同步运行,采用一种基于专家PID的同步控制策略 [5] 。专家PID控制可以通过预设偏差的极大值和极小值,动态调整控制算法,实现独立、实时、可靠的风速控制,其风速控制原理图如图6所示:
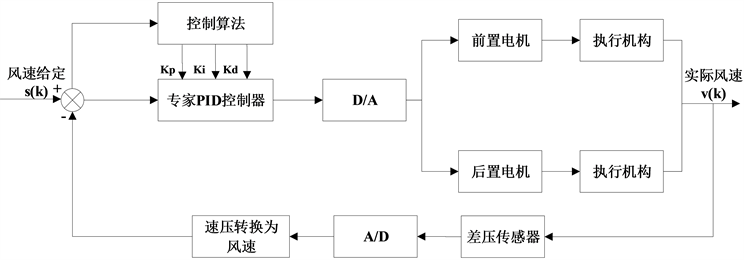
Figure 6. Schematic diagram of bipolar pair cyclone synchronous control based on expert PID control
图6. 基于专家PID控制的双极对旋风机同步控制原理图
由于前置电机与后置电机同步运行,要保证两电机的参数一致;所以将偏差量的1/2,即
分别作为两极电机的偏差量进行调节:
a) 对前置电机预设一个偏差量的极大值
以及一个极小值
;
b) 当前置电机的偏差量
时,说明系统的偏差量过大,将给定风速设置成双极对旋风机的最大风速,使得偏差在最快的时间内被消除;
c) 当前置电机的偏差量
,且偏差变化率
,说明系统正在朝着偏差量增大的方向变化,为了消除偏差量,需要改变系统的误差
变化趋势,继续调节前置电机的比例调节系数
、积分调节系数
和微分调节系数
,使得偏差变化率
,从而逐渐消除偏差量;
d) 当前置电机的偏差量
,说明系统的偏差量较小,只需调节比例调节系数
和积分调节系数
,采用的公式如下:
e) 后置电机的调节方式与前置电机一致。
5. 试验数据与结果分析
在亚声速风洞内开展风洞试验,根据目标风速的不同,选用不同的控制策略来控制电机。试验段风速测量结果如下表所示。
由表1可知:选用不同的控制策略来控制电机可以满足亚声速风洞的风速需求;由图7可知:在高风速状态下,双极电机同步运行采用专家PID控制算法,可以在很短的时间内达到目标风速,风速控制效果较好,在稳定后风速误差不超过0.1%,风速波动较小,满足亚声速风洞试验需求。

Table 1. Wind speed operation results of the test section
表1. 试验段风速运行结果
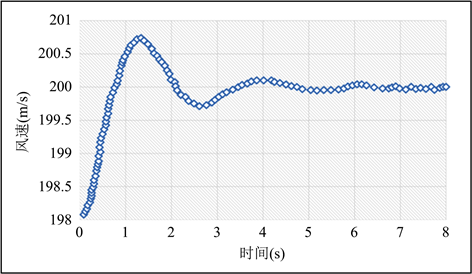
Figure 7. Wind speed control curve at a given wind speed of 200 m/s
图7. 给定风速200 m/s下的风速控制曲线图
6. 结论
本文基于某亚声速风洞,根据风速区间以及双极对旋风机的工作模式,设计了分段风速控制策略研究来控制亚声速风洞的风速。通过分段风速控制策略,可以根据风洞试验时的实际风量需求对双极对旋风机的工作模式进行调整,使双极对旋风机始终保持较为安全合理的经济运行状态。通过风洞试验的数据可以看出,分段风速控制策略能够满足亚声速风洞的实际风速需求。